Top 10 Key Factors in Robotic Arm Design for Beginners?
In the realm of Robotic Arm Design, aspiring engineers often face numerous challenges. According to Dr. Emily Carter, a leading expert in robotics, "Designing a robotic arm involves both creativity and technical skill." Her insight emphasizes the balance needed in this field.
Beginners may feel overwhelmed by the complexity of their tasks. Every component, from the motors to the sensors, plays a crucial role. Understanding the dynamics of movement can be frustrating. Beginners must grasp force calculations and weight distribution. It's essential to apply theory to real-world applications.
Moreover, many overlook the importance of prototyping. Creating models allows for testing and refinement. Failure can be a stepping stone toward success. An iterative design process nurtures innovation, even if it feels daunting at times. Embracing mistakes is vital in Robotic Arm Design. Each misstep offers invaluable lessons for the next attempt.
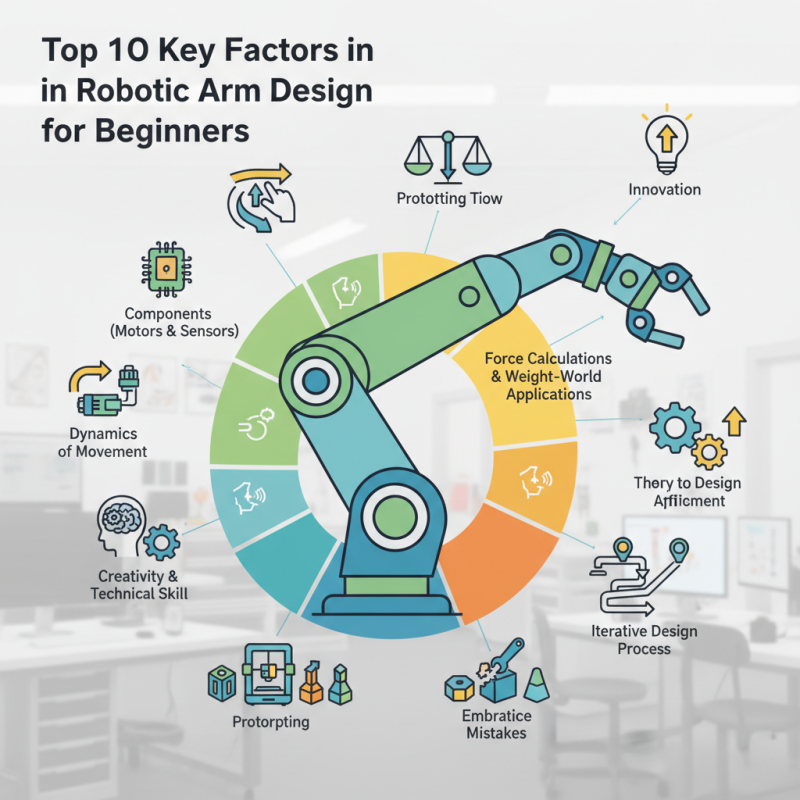
Fundamental Concepts of Robotic Arm Mechanics
Designing a robotic arm can be both exciting and challenging. Understanding the fundamental concepts of mechanics is crucial. Every robotic arm has joints, links, and actuators. These components determine the arm's range of motion and capability. The joints allow movement, while links connect different sections.
**Tip:** Keep the design simple at first. Focus on just a few joints and basic motions. As you get comfortable, add more complexity.
Torque is another important factor. It affects how much weight the arm can lift. Each actuator must provide sufficient force. If one part fails, the entire system might not function properly. Evaluate load requirements carefully.
**Tip:** Test your design with smaller weights. This simplifies calculations and reduces frustrations. Learn from mistakes and iterate your design.
Consider the materials used in construction. Lightweight materials can improve efficiency. However, they may compromise strength. Finding the right balance takes time. Ensure everything aligns well for smooth operation.
**Tip:** Use prototyping tools to visualize your design. Sometimes what looks good on paper doesn’t translate well in practice. Maintain a flexible mindset throughout your process.
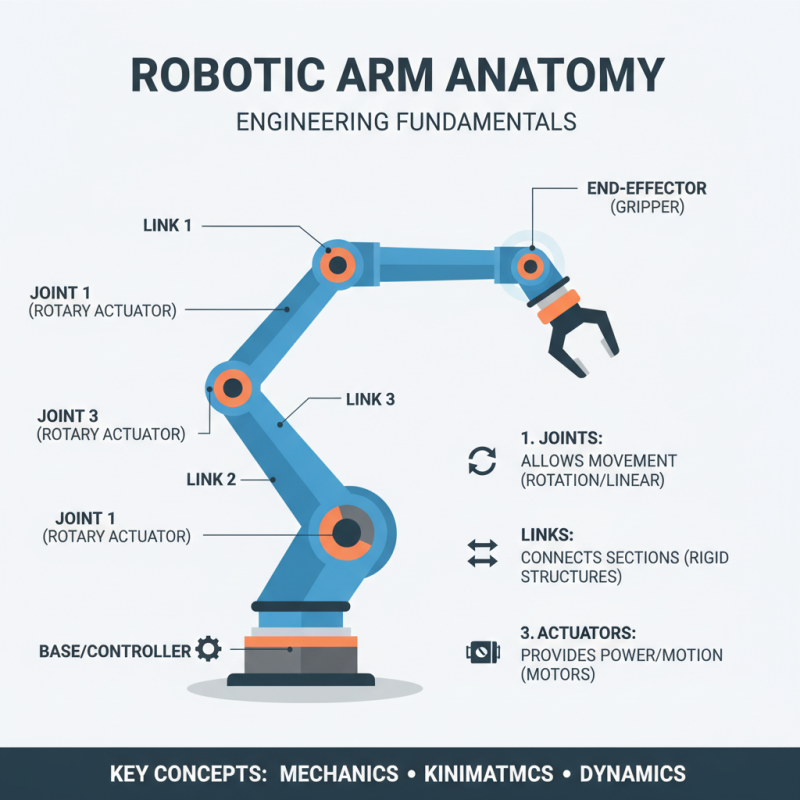
Essential Components of a Robotic Arm Design
When designing a robotic arm, essential components play a crucial role in its functionality and efficiency. The actuator is one of the key components. It determines the arm's movement and strength. According to industry reports, the performance of actuators can directly impact the precision of robotic tasks. In a study by the Robotics Institute, nearly 30% of design failures stemmed from inadequate actuator selection.
Another vital element is the sensor system. Sensors provide feedback for the robotic arm to optimize its tasks. A report by the American Society of Mechanical Engineers states that robotic systems using advanced sensors demonstrate a 40% increase in task efficiency. However, integrating sensors can be challenging. Not all sensors are compatible with various control systems. This misalignment can lead to increased costs and extended development time.
Lastly, the control system is the brain of the robotic arm. It coordinates all actions and processes data from sensors. Yet, early designs often overlook the necessity for a flexible control interface. Lack of flexibility can hinder operation under changing conditions. Industry data shows that approximately 25% of beginners face obstacles due to rigid control systems. Choosing the right components ensures creativity and innovation in robotic arm design. However, it’s essential to remember that even with the best parts, designs may require iterative improvements.
Understanding Actuators and Motors in Robotics
In robotics, understanding actuators and motors is crucial for designing effective robotic arms. Actuators convert electrical energy into motion. They create movement in robotic joints. These components are essential for arm flexibility. Selecting the right actuator can be challenging. Beginners often overlook power and torque. These factors greatly impact performance.
Electric motors are a common choice. They are versatile and easy to control. However, motor types vary in efficiency. Brushless motors offer higher performance, but they can be complex. For newcomers, brushed motors might be more intuitive. Despite this, they require regular maintenance that can be a hassle.
Pneumatic actuators are also worth considering. They operate using compressed air and allow rapid movements. However, they need proper setup and may not suit all designs. Hydraulics offer strong force but come with weight and complexity. Balancing these options requires careful thought. Many beginners make mistakes here, underestimating the importance of choosing the right actuator.
Top 10 Key Factors in Robotic Arm Design for Beginners
| Factor |
Description |
Example Component |
Importance Level |
| Actuator Type |
Choosing between servo, stepper, or linear actuators affects precision and control. |
Servo Motor |
High |
| Payload Capacity |
The ability of the robotic arm to lift and manipulate objects without failure. |
Load Sensors |
High |
| Range of Motion |
The extent to which the robotic arm can move to reach different locations. |
Rotary Joints |
Medium |
| Control System |
The method of controlling the arm, whether through programming or manual input. |
Microcontroller |
High |
| Material Choice |
The selection of materials affects weight, strength, and durability. |
Aluminum |
Medium |
| Feedback Mechanisms |
Sensors provide feedback to enhance accuracy and response time. |
Encoders |
High |
| Power Source |
The type of power used impacts performance and flexibility. |
Lithium Battery |
Medium |
| Safety Features |
Incorporating safety elements prevents accidents during operation. |
Emergency Stops |
High |
| Cost Efficiency |
Balancing performance with budget constraints is key to successful projects. |
Budget Components |
Medium |
| Scalability |
Designing for future upgrades or expansions enhances long-term usability. |
Modular Design |
Low |
Importance of Sensor Integration for Feedback Control
Sensor integration plays a crucial role in robotic arm design. Effective feedback control improves precision and functionality. According to a 2021 industry report, 65% of robotic failures are linked to inadequate sensor systems. Thus, understanding how to integrate sensors can make or break a project.
Using sensors like encoders and accelerometers can enhance accuracy. They provide real-time data, allowing the robotic arm to adapt swiftly. This adaptability is vital in dynamic environments. The same report highlights that arms equipped with advanced sensors increase task efficiency by 40%. However, sensor integration is not always straightforward. Calibration issues often arise, leading to performance inconsistencies.
Moreover, selecting the right sensor types can be confusing. Too many options may overwhelm beginners. Some might opt for cheaper sensors, resulting in lower accuracy. Testing and tweaking the system are key to finding the right balance. Continuous feedback loops can lead to better performance but require substantial time and effort. Embracing these challenges is essential for growth in robotic arm design.
Top 10 Key Factors in Robotic Arm Design for Beginners
This chart illustrates the importance level of various factors in robotic arm design, with sensor integration being the most critical. Each factor is rated on a scale from 1 to 10, helping beginners understand the priorities in designing effective robotic arms.
Design Considerations for Stability and Precision in Robotics
Designing a robotic arm requires careful consideration of stability and precision. Stability ensures that the arm can support its own weight and any added loads without tipping over or wobbling. A well-designed base and careful weight distribution are crucial. Using heavier materials in the base can help with stability but may increase overall weight.
Precision is equally important. It determines how accurately the robotic arm can perform tasks. Stepper motors or servo motors are common choices for achieving precise movements. Each joint should have a limited range of motion to prevent overshooting. However, this can lead to frustrating conflicts in design if not carefully aligned.
Integration of sensors can enhance both stability and precision. These sensors can monitor real-time positions and adjust movements accordingly. But, optimizing sensor feedback can be challenging. Balancing speed and accuracy often requires multiple iterations. An initial design may perform poorly, exposing faults that need correction. Observing flaws in the design process is essential for growth. What may seem perfect at first can often be refined through trial and error.